 C’est en tout cas la promesse de la technologie Visual Slam.
C’est en tout cas la promesse de la technologie Visual Slam.
VSLAM est l’acronyme de Visual Simultaneous Localization and Mapping, c’est à dire permettre de se localiser et de cartographier un environnement en exploitant des images de manière continue.
Le principe de base reste simple :
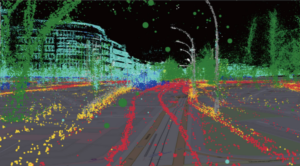
Le système proposé scanne en « temps réel » un ensemble de points (plus de 500 000 par seconde) à partir d’une caméra et « triangule » leurs positions en 3D pour bâtir un environnement « physique ». L’objectif avoué de cette technologie est de pouvoir très simplement « mapper » n’importe quel environnement et de se localiser au sein de celui-ci.
Une petite précision d’entrée, la technologie VSLAM est purement une solution « logicielle » qui peut donc s’interfacer avec des éléments Hardware déjà existants comme les caméras dans les voitures autonomes par exemple.
La localisation par le traitement d’images n’est pas nouvelle,
des systèmes évolués sont déjà présents exploitant des caméras 3D mais ils restent propriétaires et très chers.
Vous trouvez également ce système dans vos robots aspirateurs Roomba par exemple puisqu’ils utilisent ce même procédé pour analyser leur environnement, cartographier les différents éléments d’une pièce et ainsi se diriger librement. Une sorte de Lidar simplifié mais sans le coût.
C’est d’ailleurs ces possibilités de positionnement sans satellites qui intéressent la NASA puisque c’est un moyen opérationnel pour les robots autonomes qui seront envoyés sur mars de pouvoir se diriger en évitant les obstacles (pas de GPS dans l’espace !)
C’est précisément lorsque ce signal GPS n’est pas disponible que la technologie VSLAM apporte tout son sens.
Imaginez un instant que vous devez vous déplacer dans les dédales des sous sols d’un grand hôpital, pas de GPS bien entendu et pas de Wi-Fi éventuels pour pouvoir vous repérer.
La technologie par l’image vous permet de vous guider au sein des couloirs grâce à la reconnaissance des lieux qui aura été faite au préalable (cartographie effectuée par un robot notamment).
La technologie permet également d’ajouter à ces données « points », des caractéristiques spécifiques liées à l’environnement même (croisement, présence d’un élément sur un mur) qui une fois analysées et introduites dans un système intelligent, permettront d’affiner encore la navigation (et ce, en utilisant simplement votre smartphone).
D’ailleurs Google ne s’y est pas trompé puisque les ingénieurs de la firme américaine projettent de mettre à disposition cette technologie dans la solution Google Maps, afin d’une part, de renforcer la précision de géolocalisation actuelle et d’autre part, de proposer un palliatif en cas d’absence de signaux GPS (dans les centres commerciaux, les métros…)
Dorénavant quand vous verrez une Google Car dans la rue, peut être que celle-ci ne prend pas simplement une photo pour StreetView mais l’utilise pour la géolocalisation par VSLAM ?
Rémy Poulachon
Directeur Innovation